


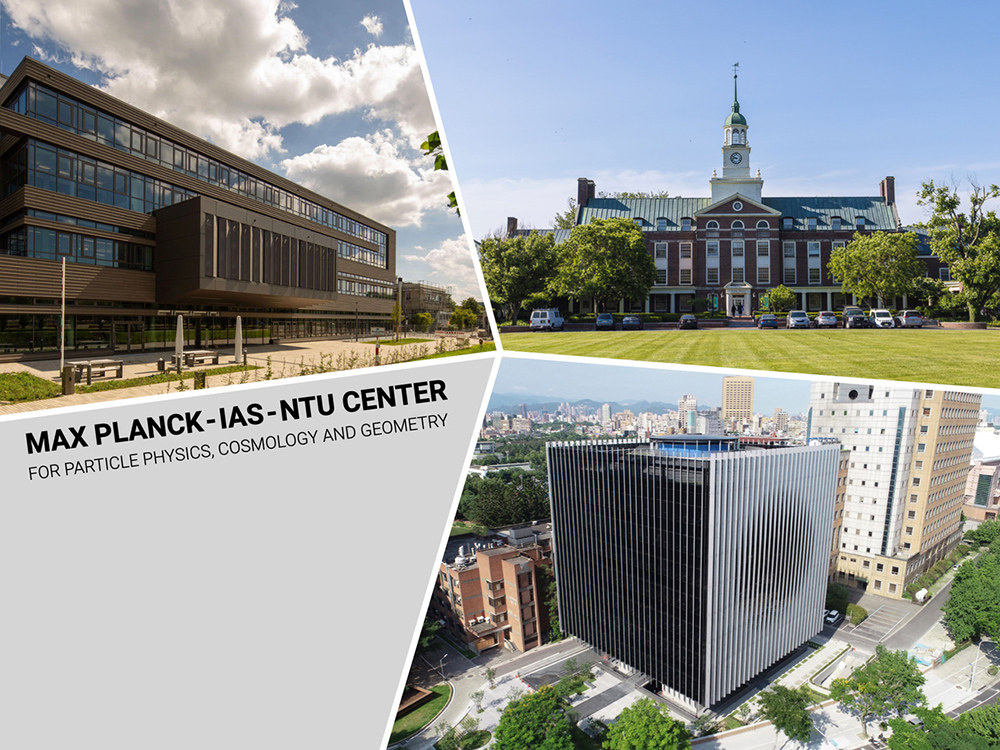
A Distinguished Global Research Center Established at NTU under Trilateral Cooperation
瀏覽器版本過舊,或未開啟 javascript
請更新瀏覽器或啟用 javascript
Spotlights
Date: Jul 17, 2015

The NTU-ME team demonstrated an autonomous fleet, which consists of an automated electric golf cart and a three-wheel light electric vehicle.
The SAE Taipei Section held the first autonomous vehicle demonstration in Taiwan on May 16th this year. The team of the Department of Mechanical Engineering, National Taiwan University (NTU) was led by the Department Chair, Prof. Yao-Joe Yang (楊燿州), Vice Chair, Prof. Tyng Liu (劉霆副), Prof. Jung-Ho Cheng (鄭榮和) and Prof. Kang Li (李綱). The NTU-ME team demonstrated an autonomous fleet, which consists of an automated electric golf cart and a three-wheel light electric vehicle (LEV).
The demonstration was held at the Automotive Research & Testing Center (ARTC), and the demonstration included three scenarios: the first stage involves a S-shape curve marked by traffic cones, and the autonomous vehicles need to navigate the S shape curve according to the boundaries marked by the traffic cones without coming into contact with the cones; the second stage requires the vehicle to detect the position of a broken down vehicle with a warning sign placed ahead on a two lane road, and the autonomous vehicles need to detect the situation and navigate to the other lane; the last stage involves a dummy pedestrian crossing the two lane road, and the autonomous vehicles must first detect the presence of the pedestrian and brake to let the pedestrian pass.
Prof. Kang Li’s graduate students were in charge of the control system development for the NTU-ME autonomous vehicle. The core technology used for vehicle automation involves real-time precision GNSS/INS positioning, map guided vehicle motion control and laser/vision sensor based environment perception and cognition. The digital map based vehicle automation approach has the advantages, such as low cost (Sensors cost only one tenth of the Google’s self-driving car), applicable to a wide range of indoor/outdoor applications, and high reliability. The autonomous vehicle control system was further adapted onto the three-wheel LEV (which was developed by Prof. Jung-Ho Cheng’s group) as a vehicle following control system, which was able to track a target and adjust the following distance and speed using vision and laser sensors.
The NTU-ME autonomous vehicle team consists of graduate and undergraduate students from the course “Intelligent Vehicle Design and Development.” It is worth mentioning that the student team spent only nine months from putting together a team to demonstrating the results at the competition. The students involved gained many hands-on skill training and practical experiences in the fields, such as mechatronics, real-time control systems, mechanical design and signal processing. This competition provides not only a valuable opportunity for the students involved to demonstrate their ability for combining theoretical knowledge and practical engineering skills, but also a chance to learn the importance of teamwork.
A Distinguished Global Research Center Established at NTU under Trilateral Cooperation

Collaborative study between NTU and Japan uncovers the origin of Adzuki Beans and agriculture in Japan
NTU Launches Center for Innovation in Enterprise Law—with Forum Highlighting Trump’s Policy and Legal Shifts Amid Geopolitical Tensions

NTU and Ministry of Environment Sign MOU to Advance Net-Zero Transition and Environmental Resilience

NTU Hospital’s Cardiac Transplant Team Pioneers Beating Heart Transplant with Zero Ischemic Time
Current Spotlights
A Distinguished Global Research Center Established at NTU under Trilateral Cooperation
Collaborative study between NTU and Japan uncovers the origin of Adzuki Beans and agriculture in Japan
NTU Launches Center for Innovation in Enterprise Law—with Forum Highlighting Trump’s Policy and Legal Shifts Amid Geopolitical Tensions
NTU and Ministry of Environment Sign MOU to Advance Net-Zero Transition and Environmental Resilience
NTU Hospital’s Cardiac Transplant Team Pioneers Beating Heart Transplant with Zero Ischemic Time